![Step 2 Chassis ECS and Wheel Aligment [PDF]](https://pdfs.asia/img/200x200/step-2-chassis-ecs-and-wheel-aligment.jpg)
4 0 6 MB
WHEEL ALIGNMENT & ECS
WHEEL ALIGNMENT & ECS
1
Training Material & Publication
WHEEL ALIGNMENT & ECS
DAFTAR ISI WHEEL ALIGNMENT Pentingnya Wheel Alignment ------------------------------------------------------------------------------Yang terjadi dalam proses Alignment -------------------------------------------------------------------Peralatan yang diperlukan ---------------------------------------------------------------------------------Ketinggian yang tepat ---------------------------------------------------------------------------------------Prosedur diagnosa untuk Alignment-----------------------------------------------------------------------Chamber----------------------------------------------------------------------------------------------------------Caster -------------------------------------------------------------------------------------------------------------Toe -----------------------------------------------------------------------------------------------------------------Steering Axis Inclination (Sai) -------------------------------------------------------------------------------Sudut ------------------------------------------------------------------------------------------------------------Keseimbangan Steering ------------------------------------------------------------------------------------Pengesetan kembali -----------------------------------------------------------------------------------------Thrust Angle -----------------------------------------------------------------------------------------------------Pusat steering ---------------------------------------------------------------------------------------------------Toe keluar dari putaran ------------------------------------------------------------------------------------Diagnosa dengan gejala mobil ----------------------------------------------------------------------------Kesatuan frame dan body (Monocoque) ---------------------------------------------------------------Sistem Suspensi ----------------------------------------------------------------------------------------------Suspensi depan -----------------------------------------------------------------------------------------------Suspensi belakang -------------------------------------------------------------------------------------------Sprung Weight dan Unsprung Weight -------------------------------------------------------------------Model penyederhanaan suspensi ------------------------------------------------------------------------Osilasi sprung weight -----------------------------------------------------------------------------------------
SEMI-ACTIVE ECS Semi-Active Ecs (Electronic Controlled Suspension) -----------------------------------------------Sistem Sky Hook -----------------------------------------------------------------------------------------------Sky Hook Damper – Keuntungan dari Damper tipe Reverse -------------------------------------System Performance ----------------------------------------------------------------------------------------Konstruksi dan Pengoperasian dari shock absorber ------------------------------------------------Shock Absorber Ecs Karakteristik Gaya Damping -------------------------------------------------------------------------------Kontrol Semi-Active ------------------------------------------------------------------------------------------Konstruksi dari Semi-Active Ecs --------------------------------------------------------------------------Inputs & Outputs ----------------------------------------------------------------------------------------------Inputs 1) Terminal Alternator 'L' ---------------------------------------------------------------------------------2) Switch rem -----------------------------------------------------------------------------------------------3) Switch mode Ecs (Switch Sport/Normal) ---------------------------------------------------------4) Sensor kecepatan mobil ------------------------------------------------------------------------------5) Sensor Steering -----------------------------------------------------------------------------------------6) Sensor Posisi Katup Gas -----------------------------------------------------------------------------7) Sensor Percepatan (G-Sensor) ---------------------------------------------------------------------Outputs 1) Relay Penggerak ---------------------------------------------------------------------------------------2) Lampu Ecs -----------------------------------------------------------------------------------------------3) Valve Solenoid (Tipe Proportional) -----------------------------------------------------------------2
Training Material & Publication
WHEEL ALIGNMENT & ECS Daftar Dtc -------------------------------------------------------------------------------------------------------Kode diagnosa masalah ------------------------------------------------------------------------------------Diagram Pengkabelan --------------------------------------------------------------------------------------
3
Training Material & Publication
WHEEL ALIGNMENT & ECS
WHEEL ALIGNMENT
PENTINGNYA WHEEL ALIGNMENT Wheel alignment (kelurusan roda) adalah suatu penyetelan yang meliputi komponen suspensi dan steering, roda dan rangka kendaraan. Pabrik pembuat kendaraan menentukan sudut penyetelan whell alignment ini berdasarkan kontruksi kendaraan dan kegunaannya. Banyak mekanisme penyetelan yang dapat dipakai seperti misalnya dengan pemakaian shims, cams, threaded rod dan slotted frame yang biasanya memberikan pengaturan yang baik, pengaturan ketinggian yang benar, sehingga mendapatkan mobil yang sesuai dengan spesifikasinya. Saat semua sudut telah sesuai dengan spesifikasinya, mobil atau truk telah disusun dengan tepat, dan merupakan kompromi yang paling baik antara gesekan rolling yg kecil, usia pemakaian roda yang paling lama, stabilitas mobil di jalan dan kontrol steering oleh pengemudi. Kecelakaan mobil, guncangan di jalan, serta bongkar pasang dapat membuat beberapa sudut menyimpang dari specifikasi. Saat itu terjadi, akan dapat mempengaruhi dalam pengontrolan kendaraan, dan roda mungkin akan tidak seimbang serta cepat habis. Saat inilah mobil perlu untuk di setting ulang, untuk mendapatkan sudut yang tepat. Tanda tanda saat mobil perlu untuk pelurusan roda : Pemandangan yang tidak semestinya pada roda. Lihatlah dengan cermat 4 roda anda. Jika salah satu dari mereka, memperlihatkan keausan roda yang berlebihan di salah satu roda, terlihat meliuk, terdapat strip diagonal pada pinggiran atau memotong serat ban atau mulai timbulnya bulu akibat serat ban pada pinggir, menandakan diperlukannya pelurusan lagi. Ketidaknormalan yang dirasakan saat mengemudi. Jika kemudi terasa berat dari biasanya, atau jika roda tidak dapat balik ke posisi tengah saat kemudi dilepas, atau jika mobil terasa tersendat sendat, mungkin roda rodanya sudah tidak lurus lagi. Jika kemudi harus dimiringkan ke salah satu sisi saat roda depan diarahkan lurus kedepan,
4
Training Material & Publication
WHEEL ALIGNMENT & ECS maka pelurusan roda diperlukan. Saat mengemudi, jika mobil ingin di dorong ke salah satu sisi, cenderung menyimpang atau bergelombang, atau bergetar, anda harus lakukan pengecekan kelurusan roda segera. Ada tiga dasar sudut sudut roda, seperti Camber, Caster dan Toe yang menentukan sebuah mobil distel dengan tepat dan bergerak kearah yang ditentukan. Ketiga sudut ini harus di set dengan tepat untuk mendapatkan kelurusan roda yang benar. Kelurusan empat roda sangat penting untuk mobil dengan tipe FWD (front wheel drive) dan suspensi belakang yang independen. Roda bagian belakang harus mengikuti roda depan yang terhubung secara parallel. Jika roda belakang mempunyai arah sedikit berbeda, mereka akan mempengaruhi keausan roda dan kestabilan mobil.
Kesalahan umum pada kelurusan yang harus dihindari adalah : Kesalahan saat pembuatan inspeksi mobil yang akurat, termasuk pengukuran tinggi untuk memastikan kualitas dari kelurusan roda. Gagal untuk menarik rear turn-plate pin selama pelurusan poros. Pemasangan baut pada rear hub yang terlalu kencang, menyebabkan deformasi. Ingatlah, untuk mengecek terlebih dahulu getaran bagian belakang mobil sebelum mengganti dengan yang baru. Fakta-fakta lain yang harus diketahui tentang kelurusan roda: Pelurusan roda harus dimulai dan diakhiri dengan test drive. Keausan ujung bagian depan dan sambungan kemudi harus di check sebelum melakukan kelurusan. Roda roda harus mempunyai bentuk yang bagus dengan pola keausan yg sama. Masalah tarikan tidak selalu disebabkan oleh kelurusan roda, dapat juga disebabkan oleh masalah dengan roda, rem, dan kekuatan kemudi. Hal ini tergantung pada teknisi pelurusan roda untuk mengetahui penyebabnya.
Apa yang dilakukan selama Pelurusan Sebelum dilakukan pelurusan roda, semua inspeksi dari bagian bawah mobil secara menyeluruh, termasuk bagian suspensi, paking / ring, sambungan kemudi, ball joint dan bearing roda, roda dan ban, termasuk juga frame mobil dan ketinggiannya. Kekenduran dan kekencangan suku cadang perlu untuk dicek. Setelah inspeksi lengkap, mobil di check dan diatur pada mesin pelurus, untuk camber, caster, dan toe, dimulai dengan roda bagian belakang. Item Item yang di cek sebelum mengukur kelurusan roda antara lain : Tekanan angin pada roda (Dalam kondisi standard) 5
Training Material & Publication
WHEEL ALIGNMENT & ECS Keausan pemakain roda yg tidak sama & perbedaan ukuran roda. Pergerakan Ball joint akibat pemakaian Pergerakan Tie rod end akibat pemakaian Pergerakan Bearing roda depan akibat pemakaian Panjang dari batang penyangga di bagian kiri dan kanan Perubahan bentuk atau keausan suku cadang kemudi Perubahan bentuk atau keausan suku cadang yang berhubungan dengan suspensi depan. Jarak Chassis-ke-ground Pengecekan Alignment diperlukan saat kemudi, suku cadang suspensi, atau komponen dari driveline FWD (front wheel drive) diganti atau saat dilakukan penggantian roda, atau saat customer mengeluh adanya tarikan mobil, roda yang lecet, melengkung, atau salah satu sisi roda lebih cepat. Tipe pelurusan yang dihasilkan biasanya tergantung pada jumlah pengaturan yang dapat dikerjakan pada mobil, sesuai dengan perlengkapan yang tersedia di toko. Sebuah poros roda, mobil RWD (rear wheel drive), sebagai contoh, pelurusan thrust biasanya diberikan sehingga roda depan lurus dengan poros belakang. Arah kemudi dari poros belakang mengacu pada garis thrust, yang secara teori sama dengan pusat geometri dari mobil.
Thrust line Geometric center line
Sistem pelurusan empat-roda meliputi pengaturan roda belakang untuk mendapatkan camber dan toe tepat dan sudut thrust yang sebisa mungkin mendekati nol, kemudian mengatur roda depan sama dengan garis tengah mobil. Pelurusan keempat roda direkomendasikan pada hampir semua mobil FWD, MPV (Multi Purpose Vehicle), beberapa SUV (Sport utility Vehicles) dan RWD dengan suspensi independen.
6
Training Material & Publication
WHEEL ALIGNMENT & ECS
PERALATAN YANG DIPERLUKAN Untuk melakukan pelurusan empat-roda, diperlukan alat four-sensor. Turnplate atau rearplate yang ada pada keempat sudut diperlukan selama pelurusan empat-roda dan pelurusan thrust. Roda belakang harus relaks pada posisi normal untuk mendapatkan pembacaan yang tepat pada kondisi diatur atau tidak. Sebagai tambahan untuk mendapatkan pembacaan caster, camber dan toe, mesin pelurusan dapat digunakan sama seperti sebuah alat diagnosa. Sudut sudut diagnosa seperti Steering Axis Inclination (SAI), Included Angle (IA), setback dan turning radius dapat membantu teknisi untuk mengidentifikasi masalah yang mungkin saja terlewatkan. Saat pembacaan SAI digabungkan dengan pembacaan camber, penjumlahan dari kedua sudut tersebut sama dengan IA. Menggunakan SAI/IA dan camber akan membantu indentifikasi komponen yang menekuk atau diganti. Setting optimal pada semua mobil untuk setback adalah nol, maka pembacaan setback pada positif atau negative mengindikasikan pergantian atau mungkin beberapa komponen terlepas. Turning Radius, juga mengacu pada balikan toe-out, yang telah ditentukan oleh steering arms relative terhadap poros lower steering. Saat mobil berbelok, steering arm akan menyebabkan roda roda berbelok pada sudut yang berbeda, menciptkaan kondisi toe-out. Jika turning radius tidak benar, periksa komponen steering arm dan lower steering pivot kemungkinan ada kerusakan. Dengan menggunakan turnplate pada peralatan alignment, teknisi dapat memeriksa tekukan steering arm dengan mengukur jumlah toe-out pada belokan untuk tiap tiap roda dan membandingkannya.
KETINGGIAN HARUS BENAR Beberapa peralatan alignment yang tersedia saat ini, juga dapat mendiagnosa ketinggian kendaraan, yang sangat penting untuk mendapatkan alignment dan geometri suspensi yang tepat. Ketinggian kendaraan adalah sudut yang ada pada semua roda, dan harus dipertahankan sesuai spesifikasi perakitan untuk performa yang optimum dari kemudi dalam, suspensi, dan sistem driveline. Saat mobil telah dimodifikasi dari desain aslinya, alignment pabrik mungkin sudah tidak diterapkan lagi. Pengubahan ukuran roda memungkinkan perubahan jarak poros dari tanah, yang akan mempengaruhi radius gesekan. Peningkatan atau penurunan tinggi mobil kemungkinan akan merubah suspensi dan sistem geometri kemudi selama belokan dan menyebabkan perubahan toe yang berlebihan atau tekanan yang melebihi batas pada beberapa suku cadang.
[Camber change by a sagging spring]
7
Training Material & Publication
WHEEL ALIGNMENT & ECS Pegas yang jelek dapat mendorong bagian dalam kemudi dan sistem suspensi tidak lagi sesuai dengan alignment yang tepat, yang menyebabkan masalah pada beberapa mobil. Sebuah alignment yang benar dengan suspensi yg jelek masih dapat menghasilkan keausan roda dan masalah handling selama beroperasi. Cara yang tepat untuk membetulkan ketinggian kendaraan adalah dengan mengganti pegas (catatan : Pegas harus diganti sepasang sekaligus). Perubahan pada ketinggian kendaraan akan mempengaruhi camber dan toe, jadi jika pegas diganti atau batang torsi diatur, maka alignment roda harus dicek untuk menghindari kemungkinan keausan roda. Sangatlah penting untuk mengetahui bahwa tanda tanda koil pegas yang mulai lemah adalah dengan memeriksa lengkungan pada ketinggian kendaraan. Jika ketinggian kendaraan bagus, maka pegas juga bagus. Mobil dengan suspensi udara mempunyai prosedur khusus yang diperlukan untuk mendapatkan alignment ketinggian yang benar sebelum diatur. Pada beberapa sistem suspensi udara, pertama perlu untuk membuat udara pegas mencapai temperature asli sebelum di atur. Pendeteksian yang salah pada ketinggian chasis yang tidak benar dapat membuat teknisi salah diagnosa, seperti memberikan range pengaturan ke frame yang menekuk.
PROSEDUR DIAGNOSA UNTUK ALIGNMENT Masalah roda, rem dan driveline sering disalahkan untuk problem alignment oleh pemilik mobil, maka customer seharusnya berkonsultasi mengenai perlu atau tidak diluruskan. Dimulai dengan menanyakan ke customer beberapa pertanyaan sederhana, seperti Apa yang terjadi pada mobil anda, sehingga anda pikir perlu dilakukan alignment ? apakah dia lambat ? Kapan dia melambat ? apakah kemudi rodanya lurus ? Apakah rodanya sudah tampak usang ? Selanjutnya, Tentukan problemnya dengan test drive dan pemeriksaan lengkap pada roda dan pola yang terlihat, untuk mengindikasikan problem kemudi atau suspensi. Jika customer memerlukan roda baru, uji roda yang lama untuk keausan yang tidak biasanya sebelum mereka melepaskannya dari mobil. Jelaskan ke customer bagaimana roda baru akan mengalami penggunaan yang sama dengan roda yang lama, kecuali adanya perbaikan pada problemnya. Jika kemudi atau suku cadang suspensi ditemukan kendur, tunjukan ke customer masalah sebenarnya. Jika memungkinkan, demonstrasikan fungsi dari suku cadang itu dengan benar pada mobil yang serupa di showroom sebagai pembanding. Karena padatnya jadwal pada hampir semua toko, langkah ini kadang terlewatkan meskipun orang orang banyak belajar dari demostrasi tersebut.
8
Training Material & Publication
WHEEL ALIGNMENT & ECS Sangatlah penting untuk selalu seksama saat berdiskusi tentang spesifikasi pabrik untuk steering dan komponen suspensi. Beberapa suku cadang chassis harus mempunyai kekenduran lebih besar dari toleransi yang terdaftar sebelum diganti. Pada beberapa kasus, beberapa suku cadang masih dalam batas toleransi tapi masih dapat menyebabkan masalah pada keausan roda, alignment dan handling. Beberapa toleransi untuk kekenduran dalam spec dapat menimbulkan masalah untuk pengemudi mobil, tapi replacement tidak diperlukan selama toleransi masih dapat dicapai. Saat memberi saran ke customer, jelaskan meskipun ball joint masih dalam toleransi, kekenduran dapat menggerakan roda dan menciptakan perubahan sudut alignment. Suku cadang yang longgar, tapi masih dalam toleransi, seharusnya tidak disebut jelek. Beberapa komponen kemudi seperti tie rod end mungkin tidak mempunyai batas toleransi. Inspeksi dari komponen komponen ini akan dipercayakan pada penilaian teknisi, menggunakan tekanan tangan atau metode lainnya seperti pengukuran kekenduran.
CAMBER Camber adalah sudut dari roda, diukur dalam derajat, saat dilihat dari depan mobil. Roda depan dari mobil, dipasang dengan bagian atasnya dimiringkan keluar atau kedalam. Ini disebut camber dan diukur dalam derajat kemiringan dari arah vertikal. Saat bagian atas roda dimiringkan keluar, dia disebut positive camber. Sebaliknya, kemiringan kedalam disebut negative camber. Pada beberapa mobil, camber berubah dengan kecepatan roda yang berbeda. Ini dikarenakan gaya aerodynamic menyebabkan perubahan pada ketinggian kendaraan dari pada saat mobil berhenti. Oleh karena itu, Ketinggian kendaraan harus diperiksa dan diperbaiki sebelum mengeset camber. Dalam beberapa tahun ini trendnya adalah penyetelan camber pada nol atau sedikit positive untuk mengimbangi beban mobil, sayangnya trend saat ini adalah setting yang sedikit negative untuk meningkatkan stabilitas mobil dan meningkatkan handling. Jika camber tidak diatur, maka akan mempengaruhi keausan pada satu sisi roda. Jika camber terlalu negative, sebagai contoh, maka roda akan dipakai pada bagian sisi dalam dari permukaannya. Pada beberapa mobil FWD (front wheel drive) camber tidak diukur. Jika camber keluar dari mobil, ini mengindikasikan sesuatu yang usang,
9
[Camber]
[Camber wear pattern]
Training Material & Publication
WHEEL ALIGNMENT & ECS mungkin dikarenakan kecelakaan dan harus diperbaiki dan diganti. Positive Camber Sekikit positive camber menghasilkan beban yang dinamik yang akan membuat roda berjalan dengan relative datar pada permukaan jalan. Positive camber juga mengarahkan berat dan beban guncangan dari mobil pada bearing roda bagian dalam yang besar dan pada splinder bagian dalam dibandingkan dengan bagian luar bearing. Positive camber yang sedang sedang saja, akan membuat umur bearing lebih panjang, memperkecil kesalahan beban yang mendadak, dan keuntungan lainnya, kemudi yang lebih mudah. Positive camber yang berlebihan yang digunakan pada roda bagian luar dapat menyebabkan keausan suku cadang suspensi seperti bearing roda dan splinder. Vehicle load
Pemberian positive camber pada roda menyebabkan beban pada bagian dalam spindle, mengurangi gaya gerak pada spindle dan steering knuckle. Gaya reaksi, yang sama besar dengan beban mobil, diberikan pada roda tegak lurus terhadap jalan. Ini dibagi dalam gaya tegak lurus ke sumbu spindle dan gaya parallel ke sumbu spindle yang mendorong roda kedalam, membantu untuk mencegah roda dari slip pada spindle. Bearing dalam roda dibuat lebih besar dari bagian luar untuk menahan beban ini.
Negative Camber
Inner wheel bearing
[Vehicle load & Wheel bearing]
Variasi pada negative camber dapat digunakan untuk meningkatkan handling Penyetelan 1/2° negative pada kedua sisi akan Vehicle load meningkatkan penyudutan tanpa mempengaruhi umur roda yang berarti. Negative setting ini mengganti kerugian pada positive camber, merubah roda bagian luar karena putaran mobil dengan cara demikian bagian permukaan roda yang bergesekan lebih datar selama menyudut / miring. Negative camber yang berlebihan menggunakan bagian dalam roda dan hampir sama dengan positive camber, dia dapat menyebabkan keausan dan stress pada suku cadang suspensi.
mobil.
Outer wheel bearing
Rear Camber Rear camber tidak bias diadjust pada sebagian besar mobil [Vehicle load & Wheel bearing] RWD (rear wheel drive). Mobil mobil ini dirakit dengan setting camber nol dan cukup kuat 10
Training Material & Publication
WHEEL ALIGNMENT & ECS untuk tidak lentur atau melengkung dalam kondisi beban normal. Hampir semua mobil front wheel drive, mempunyai spesifikasi pabrik untuk sejumlah kecil rear camber, biasanya sejumlah kecil dari negative camber untuk stabilitas di kemiringan. Jika spesifikasi pabrik mengijinkan sebuah setting 0° sampai -0.5°(30’) diperlukan untuk penggunaan roda dan stabilitas kemudi. Jika rear setting berubah, suku cadang suspensi belakang yang rusak perlu diganti. Meskipun demikian, hampir semua mobil dapat diatur dengan menggunakan tipe lain untuk pengaturan, seperti shims, cam bolt atau bushing.
Road Crown dan Camber Crowned road berarti di bagian luar atau sebelah kanan tangan kita lebih rendah dari pada sebelah kiri. Ini bermanfaat untuk pembuangan air di jalan tapi merugikan karena akan mempengaruhi handling mobil. Road Crown harus dikompensasikan dengan setting alignment sebab mengendarai mobil pada crowned road akan miring ke samping, menyebabkan beberapa beban berpindah ke sebelah kanan, dan camber berubah sedikit lebih positive. Kombinasi ini menciptakan sebuah tarikan atau penyimpangan ke kanan. Sebagian besar teknisi alignment menyetel mobil dengan sedikit lebih positive untuk camber, biasanya 1/4°(15’), pada bagian kiri untuk kompensasi road crown. Camber yang lebih positive ini tidak akan menyebabkan tarikan yang nyata saat dikendarai pada jalan yang rata. Sayangnya, jika camber tidak sama sisi ke sisi dengan perbedaan lebih besar dari 1/2°(30’), mobil akan tertarik ke sebelah sisi yang cambernya lebih positive. Secara spesifikasi 0° to ±0.5°(30’) biasanya adalah yang terbaik untuk roda dan handling mobil.
Penyebab perubahan camber Ketinggian Kendaraan Selalu periksa spesifikasi ketinggian kendaraan sebelum memulai alignment. Perubahan pada ketinggian kendaraan yg menyimpang dari spesifikasi akan mempengaruhi camber. Lengkungan Pegas Sesuai bertambahnya usia mobil, suspensi mempunyai kecenderungan untuk melengkung. Terlalu besarnya beban mobil atau perlakuan yang tidak semestinya dapat menyebabkan pegas melemah. Lengkungan cross-member atau sub-frame Faktor lain yang dipertimbangkan adalah lengkungan pada cross-member atau sub-frame. Modifikasi pada mobil seperti meningggikan atau merendahkan suspensi atau merubah 11
Pulling to the right
[Misaligned Camber]
Training Material & Publication
WHEEL ALIGNMENT & ECS keseluruhan berat dari mobil yang dapat juga mempengaruhi camber.
Masalah masalah karena Camber yang tidak benar Mobil tertarik ke salah satu sisi Keausan yg terjadi pada satu sisi pada bagian dalam atau bagian luar dari permukaan roda. Keausan bearing roda. Keausan pada ball joint (camber yang tidak benar menyebabkan peningkatan keausan pada ball joints
[Uneven wear of tire by misaligned Camber]
CASTER Caster dapat didifinisikan sebagai kemiringan dari knuckle pivot points pada kemudi, dia juga disebut sebagai sumbu kemudi. Caster diukur dalam derajat, dari sumbu kemudi ke vertical, jika dilihat dari samping. Dari penyangga pada mobil, garis memanjang melalui lower ball joint ke pusat dari pada ujung penyangga yang lebih atas. Sudut caster dibentuk dengan sumbu kemudi dan garis vertical yang melewati spindle. Kegunaan sudut caster adalah untuk menghasilkan stabilitas control arah untuk roda depan untuk jalan yang lurus dengan usaha yang minim. Sudut caster yang tepat juga membantu roda depan untuk kembali ke posisi lurus setelah dibelokan. Caster mempunyai efek yang kecil pada keausan roda. Kegunaan Caster : Untuk membantu control arah mobil, dengan cara memperbaiki arah roda depan ke posisi lurus. Membantu roda depan untuk kembali ke posisi lurus setelah dibelokkan. Untuk mengimbangi efek dari road crown sesuai arah mobil. Beroperasi bersama sama dengan desain suspensi mobil, sudut camber dan sudut kemiringan sumbu steering untuk menghasilkan perubahan camber yang diinginkan selama mobil berbelok. Beberapa mobil front wheel drive, casternya tidak bias disetting. Jika caster telah keluar dari spec, ini mengindikasikan ada sesuatu yang telah usang atau menekuk, mungkin dikarenakan kecelakaan dan harus diperbaiki atau diganti. 12
Training Material & Publication
WHEEL ALIGNMENT & ECS
Positive caster Positive caster adalah ketika bagian atas sumbu steering miring kearah belakang. Garis caster menyilang terhadap tanah didepan permukaan roda, yang memberikan arah control yang benar. Sayangnya, positive caster yang berlebihan dapat menyebabkan dua masalah. Pertama, caster yang berlebihan menyebabkan level guncangan jalan yang tinggi yang ditransmisikan ke pengendara saat mobil menghantam gundukan dan ini menyebabkan steering yang keras.
[Positive Caster]
Masalah kedua adalah bahwa roda dengan positive caster mempunyai tendensi toe bergerak masuk saat mobil dijalankan. Jika salah satu sisi mempunyai caster yang lebih positive dari yang lain, ini akan menyebabkan toe masuk ke dalam dengan gaya yang lebih besar dari sisi yang lain. Ini akan menyebabkan tarikan yg dirasakan sebesar positive caster. Negative caster Negative caster adalah saat bagian atas sumbu steering miring kedepan. Letak dari point contact didepan titik beban, yang akan memberikan steering yang lebih mudah pada kecepatan rendah.
Forward
Sayangnya, dia akan menyebabkan kesulitan pengemudi dalam mengembalikan arah dari belokan serta mengakibatkan ketidakstabilam kendaraan (seperti bergelombang) di kecepatan tinggi yang disebabkan adanya variasi permukaan jalan seperti jalan kecil yang tidak rata atau gundukan. Jika caster terlalu negative, steering akan ringan dan mobil akan ngeluyur dan sulit untuk menjaga tetap lurus.
[Negative Caster]
Forward
Zero caster Zero caster adalah saat bagian atas sumbu steering benar benar vertikal. Jika mobil 13
[Positive Caster] Training Material & Publication
WHEEL ALIGNMENT & ECS mempunyai caster yang tidak seimbang, mobil akan tertarik ke sisi dengan caster yang positivenya lebih kecil. Variasi maksimum antar satu sisi dengan yang lain ± 0.5°(30’) adalah yang direkomendasikan pada hampir semua mobil.
Pergerakan spindle saat belokan Dengan caster positive, pada saat berbelok spindle dari roda bagian dalam belokan bergerak kebawah dan spindle dari bagian luar roda bergerak ke atas. Sayangnya, ini menyebabkan spindle naik dan turun sama dengan roda dibelokan pada satu arah atau lainnya. Sebab roda tidak dapat menekan ke tanah seperti gerakan spindle dalam arc, roda dirakit dengan menaikan suspensi.
[Spindle movement while turning]
Itulah sebabnya kemampuan steering meningkat saat positive caster berjalan.
14
Training Material & Publication
WHEEL ALIGNMENT & ECS
TOE Ukuran Toe adalah perbedaan jarak antara bagian depan roda dan roda belakang.
Toe-in
atau positive Toe, didefinisikan sebagai roda bagian depan lebih berdekatan dibandingkan dengan roda belakang. Toe-out atau negative toe adalah saat roda bagian belakang lebih berdekatan dibandingkan dengan roda bagian depan. Zero Toe adalah saat roda roda lurus satu sama lain. Sebagian besar sepsifikasi alignment menunjukan toe sebagai total toe pada kedua roda, adalah penting untuk diketahui bahwa ½ dari total toe seharusnya diaplikasikan pada masing masing roda depan. Minus (-) menunjukan sebuah toe-out dan toe-in yang digambarkan dengan sebuah tanda positive (+). Toe-in : B > A,
Toe-out : B < A
Penting untuk diingat bahwa meskipun toe pada awalnya diukur sebagai jarak dengan satuan millimeter atau inchi (B-A), sekarang umumnya menggunakan satuan degree (α,β).
Idenya
adalah sudut, lebih dipilih dari pada jarak, untuk menentukan slip pada sisi roda. Ini tidak dipengaruhi oleh ukuran roda, tapi tetap konstan untuk pengukuran. [Toe & Toe angle] Contoh) Toe-in (B-A) mm(in.) : 0±2mm (0±0.08 in.) or 0.09° ± 0.09° (masing masing dalam α,β)
Tugas dari sudut Toe Fungsi utama dari sudut Toe adalah untuk menghilangkan daya dorong camber saat camber digunakan. Saat roda depan diberikan positive camber, mereka akan lebih miring keluar pada bagian atas. Ini menyebabkan dia berusaha untuk menggelinding kearah luar saat mobil berjalan maju, dan menyebabkan slip samping. Ini menyebakan keausan pada roda. Oleh karena itu, toe-in digunakan untuk roda depan untuk mencegah hal ini dengan cara meniadakan rolling keluar karena camber. Karea camber mendekati zero pada hampir semua mobil mobil saat ini, besarnya sudut toe menjadi lebih kecil juga. Kekerasan suspensi dan sudut Toe Pada saat kendaraan berjalan, gaya gaya dari segala arah dibawa ke suspensi, akibatnya roda roda akan cenderung menjadi toe-out. Untuk mencegah hal ini, beberapa mobil diberi toe-in sedikit meskipun camber-nya zero.
Pengaruh Toe Toe yang berlebihan meningkatkan gesekan / benturan roda dan pengereman pada mobil. Toe-in yang berlebihan atau positive toe, meningkatkan gesekan pada roda bagian luar. 15
Toe-
Training Material & Publication
WHEEL ALIGNMENT & ECS out yang berlebihan atau negative toe, meningkatkan gesekan pada roda bagian dalam, dan dalam beberapa kasus dapat menyebabkan masalah arah yang tidak terkontrol. Indikasi awal dari roda yang aus karena toe, dapat dilihat pada sudut serat pada permukaan pinggiran roda. Roda yang aus dapat juga ditemukan pada bagian belakang roda yang meliuk, pinggiran yang berat atau pinggiran yang halus pada permukaan roda. Terlalu banyak toe-in akan menyebabkan pinggiran yang berserat pada titik dalam, sedangkan toe-out akan menyebabkan pinggiran yang berserat pada titik luar. Toe diatur dengan membelokan toe rod turnbuckles.
[Toe wear pattern]
Variasi dari spec pabrik biasanya disebabkan oleh karena suku cadang suspensi yang usang atau menekuk atau perubahan pada setting camber dan caster. Sudut Toe dapat juga dipengaruhi oleh struktur body atau kerusakan rangka.
Pengaturan Toe a. Pengaturan Toe depan Toe-in depan dapat di adjust dengan jalan, merubah panjang dari tie rod yang terhubung pada steering knuckle. -
Menambah panjang tie rod : meningkatkan toe-in.
-
Menambah panjang tie rod : meningkatkan toe-out.
[Increase of Toe-in]
[Decrease of Toe-in]
16
Training Material & Publication
WHEEL ALIGNMENT & ECS b. Pengaturan Toe belakang Alignment roda belakang dengan suspensi independent belakang adalah dengan cara mengatur camber dan sudut toe. Metode untuk mengatur camber dan sudut toe berbeda tergantung pada tipe suspensi. Beberapa model tidak mempunyai mekanisme pengaturan camber. Dengan mengubah special cam, lengan dapat digerakan ke kiri atau ke kanan untuk mengubah arah roda, sehingga mengatur toe-in. Seperti pada toe-in depan, jika panjang dari lengan belakang tidak dibuat sama untuk mengatur toe-in dari roda belakang secara terpisah, maka sudut sudut dari roda kiri dan kanan akan berbeda, tidak peduli seberapa benarnya toe-in. Karena itu mengapa, sebelumnya, atur dengan benar sudut roda kiri dan belakang kemudian atur toe-in.
[Correct adjustment]
[Rear Toe adjustment]
17
Training Material & Publication
WHEEL ALIGNMENT & ECS
STEERING AXIS INCLINATION (SAI) Sumbu disekitar putaran roda sehingga dapat berbelok ke kiri dan ke kanan disebut steering axis (poros kemudi). Steering axis dapat diumpamakan sebuah garis lewat ball joint atas dan ball joint bawah (pivot joint) pada lengan suspensi panjang dan pendek (seperti tipe suspensi double wishbone). Sumbu ini dapat digambarkan sebagai garis antara bagian atas penyerap guncangan , lebih atas dari bearing pembantu dan lengan ball joint suspensi bagian bawah (dalam kasus suspensi tipe penyangga).
SAI
Steering Axis Inclination (SAI) adalah sudut antara garis tengah dari steering axis dan garis vertical dari pusat kontak roda (seperti tampak dari depan). SAI juga mengacu pada KPI (King Pin Inclination) pada truk dan mobil mobil tua yang menggunakan king pins bukannya ball joint.
Steering offset
Steering offset, atau Kingpin offset adalah jarak antara
[SAI of MacPherson Strut type suspension]
pusat roda dan titik pada sterring axis yang memotong permukaan jalan. Dia akan negative jika titik potongnya berada diantara pusat dan roda bagian luar. SAI memberikan driving yang bagus dan karakteristik handling dengan stabilitas arah dan proyeksi berat. Stabilitas arah adalah kecenderungan roda untuk kembali lurus setelah posisi berbelok. Saat roda dibelokkan ke kanan dan ke kiri dengan steering axis sebagai pusatnya dan diimbangi dengan radius, Penyeimbang yang besar akan membangkitkan momen yang besar disekitar steering axis karena adanya perlawanan rolling dari roda, sehingga usaha steering bertambah. Jika penyeimbang terlalu besar, gaya reaksi akan bekerja pada roda selama kendaraan direm, akan membangkitkan momen disekitar steering axis yang relevan, menyebabkan roda tertarik ke salah satu sisi khususnya pada kecepatan rendah. Momen ini proporsional terhadap ukuran penyeimbang. Jika penyeimbang mendekati nol, momen yang lebih kecil dibangkitkan disekitar steering axis saat gaya diberikan ke roda akibtanya steering sedikit
18
[SAI of Double Wishbone type suspension]
Training Material & Publication
WHEEL ALIGNMENT & ECS terpengaruh oleh adanya pengereman atau guncangan jalan. Sehingga, selama ada kecenderungan untuk memperbaiki atau mencari posisi lurus, positive caster sedikit diperlukan untuk menjaga stabilitas arah. Sebuah mobil menyediakan handling yang stabil tanpa kerusakan pada positive caster yang tinggi karena SAI. Tabel Permasalahan SAI/Camber/IA (Suspensi tipe MacPherson Strut) SAI
Camber
Included Angle
Problem Area
Sama dg Specs
Lebih dr Specs
Lebih dr Specs
Bent Spindle dan/atau Strut Body
Lebih dr Specs
Lebih dr Specs
Lebih dr Specs
Strut Tower IN pd Top dan Spindle atau Strut Bent
Kurang dr Specs
Lebih dr Specs
Sama dg Specs
Bent Control Arm atau Strut OUT diatas dan Bent Spindle atau Bent Strut Body
Kurang dr Specs
Lebih dr Specs
Kurang dr Specs
Bent Control Arm atau Strut OUT diatas dan Bent Spindle atau Strut Body
Kurang dr Specs
Lebih dr Specs
Lebih dr Specs
Bent Control Arm atau Strut OUT diatas dan Bent Spindle atau Strut Body
Sama dg Specs
Kurang dr Specs
Kurang dr Specs
Bent Spindle dan/atau Bent Strut Body
Kurang dr Specs
Kurang dr Specs
Kurang dr Specs
Strut Top atau Bent Control Arm Bent Spindle atau Strut Body
Lebih dr Specs
Kurang dr Specs
Sama dg Specs
Strut Tower IN diatas
19
dan
Training Material & Publication
WHEEL ALIGNMENT & ECS Tabel permasalahan SAI/Camber/IA (Suspensi tipe Double Wishbone) SAI
Camber
Included Angle
Problem Area
Lebih dr Specs
Sama dg Specs
Kurang dr Specs
Spindle/Knuckle atau Upper Control Arm dan/atau Control Arm Mount
Kurang dr Specs
Sama dg Specs
Lebih dr Specs
Bent Lower Control Arm dan/atau Lower Control Arm Mount
Sama dg Specs
Lebih dr Specs
Lebih dr Specs
Spindle/Knuckle Assembly
Kurang dr Specs
Lebih dr Specs
Sama dg Specs
Bent Lower Control Arm
Kurang dr Specs
Lebih dr Specs
Lebih dr Specs
Spindle/Knuckle Assembly Bent Lower Control Arm
Sama dg Specs
Kurang dr Specs
Kurang dr Specs
Spindle/Knuckle Assembly
Lebih dr Specs
Kurang dr Specs
Sama dg Specs
Bent Upper Control Arm
Prosedur Pengukuran SAI seharusnya selalu diukur setelah anda mengatur camber dan caster ke spesifikasi yang tepat atau sedekat mungkin dengan spesifikasi. Periksa suku cadang suspensi yang sudah usang. SAI paling baik diukur dengan roda depan menempel ke tanah, rem dijalankan dan perangkat alignment di atur dan dikunci. Naikan mobil dibawah lengan control bagian bawah tapi jangan merelakskan suspensi. Jangan menaikan mobil dari turntable, dapat menyebabkan ring lengan control bergerak dan roda berbelok, ini menghasilkan pembacaan yang tidak akurat. Sayangnya SAI secara tipikal tidak bias diadjust. Sebagian besar SAI yang salah dikarenakan suku cadang yang telah usang, yang harus diganti dengan kondisi yang benar. Variasi maksimum dari sisi ke sisi adalah ± 1.0° yan bisa dipakai sebagai indikasi kerusakan mobil. SAI
INCLUDED ANGLE
Camber
Included angle tidak dapat diukur secara langsung. Dia kombinasi antara SAI dan camber. Dilihat dari depan, included angle adalah SAI ditambah camber jika camber positive (artinya included angle akan lebih besar dari SAI). Jika camber negative, maka included angle adalah SAI dikurangi camber (artinya included camber akan lebih kecil dari pada SAI). Included angle harus sama dari satu sisi ke sisi lain meskipun camber berbeda. Jika variasi dari sisi ke sisi masih ditemukan lebih besar dari ± 1.5°, maka sesuatu ada yang tertekuk, biasanya steering knuckle. 20
Training Material & Publication [Included Angle]
WHEEL ALIGNMENT & ECS SAI + Camber = Included Angle (I/A)
STEERING OFFSET Steering offset, atau Kingpin offset adalah jarak pada permukaan roda antara garis roda dan garis SAI yang diteruskan kebawah melewati steering axis. Garis melewati steering axis menciptakan titik pivot disekililing roda yang berbelok. Oleh karena itu jarak harus benar benar sama dari sisi ke sisi, jika tidak mobil akan mendapat pengereman yang kuat pada semua kecepatan. Positive steering offset adalah saat permukaan kontak roda diluar SAI pivot, sementara itu negative steering offset adalah saat bagian kontak didalam SAI pivot (kendaraan dengan penggerak roda depan biasanya mempunyai penyeimbang negative steering).
Steering offset (+)
Semakin besar steering offset (positive atau negative), semakin besar pula usaha steering dan lebih besar guncangan dan pivot binding akan didapatkan. Saat mobil sudah dimodifikasi dengan penyeimbang roda, roda yang lebih besar, pengaturan tinggi dan perbedaan camber dari sisi ke sisi, steering offset akan berubah; handling dan stabilitas mobil akan terpengaruh. Steering offset didesain di pabrik dan tidak tidak dapat diajust. Jika anda mempunyai mobil yang lambat meskipun alignmentnya sudah benar, periksa sesuatu yang mempengaruhi steering offset.
SET BACK Front set back adalah saat satu roda depan di set lebih kebelakang dari roda yang lain. Dan rear set back adalah saat satu roda belakang di set lebih kebelakang dari roda yang lain. Set back yang berlebihan biasanya dikarenakan kesalahan rangka atau chassis. Kesalahan ini biasanya dikarenakan tabrakan dari arah depan dan belakang dan pada beberapa kasus dikarenakan toleransi kesalahan perakitan. Jika rangka diatur dengan tidak benar atau adanya kerusakan, tidaklah aneh untuk melihat pengurangan positive camber pada sisi dengan kondisi setback.
Set Back
Rear setback mungkin disebabkan dari rangka, chasis dan mis-alignment chasis belakang karena
21
Training Material & Publication
WHEEL ALIGNMENT & ECS tabrakan. Jika mobil mempunyai kondisi setback, mobil akan lambat di sisi berlawanan dengan sisi setback. Setback yang berlebihan dapat menyebabkan alignment tertarik ke sisi setback. Jika poros belakang diposisikan dengan benar dan semua suku cadang yang lain dan sistem dari mobil dapat bekerja dengan baik, sebuah kondisi setback akan juga menciptakan perbedaan pengukuran jarak roda sisi ke sisi.
THRUST ANGLE / Sudut Thrust Thrust angle adalah sudut yang dibentuk oleh garis thrust dan garis tengah geometric. Garis tengah geometric adalah garis diantara titik tengah poros depan dan titik tengah dari poros belakang. Jika sudut thrust tidak nol, maka mobil akan “dog-track” dan steering roda tidak akan center. Saat Toe berbeda dengan roda belakang lainnya, dia akan menciptakan sudut thrust yang menyebabkan gerakan poros belakang. Sumbu Thrust mengarahkan posisi dari roda depan saat berjalan lurus. Oleh karena itu, inilah referensi yang paling akurat saat mengukur atau mengatur roda depan. Pemeriksaan roda dapat membantu diagnosa beberapa kesalahan alignment roda. Pola keausan roda diperngaruhi oleh alignment yang tidak benar termasuk penggunaan single shoulder wear, lengkungan, dan pinggiran yang berserat.
Thrust Angle
Thrust line Centerline
[ Positive Thrust Angle]
STEERING CENTER Steering center adalah fakta sederhana bahwa kemudi roda adalah center saat mobil berjalan lurus kedepan dan jalan datar. Saat setting steering center, rear toe seharusnya di set dahulu untuk mendapatkan sudut thrust sedekat mungkin dengan garis tengah mobil. Kemudian kemudi roda dikunci pada posisi lurus kedepan, saat front toe di set. Sebelum mengunci kemudi roda, mesin harus dinyalakan dan roda seharusnya diputar ke kiri dan kekanan beberapa kali untuk [ Steering center] menghilangkan stress pada katup power steering. Tentunya, setelah dilakukan alignment harus dilakukan road test lagi untuk memeriksa control kualitas. 22
Training Material & Publication
WHEEL ALIGNMENT & ECS
TOE OUT PADA BELOKAN Jika sudut kemudi kiri dan kanan adalah sama, mereka akan mempunyai radius belokan yang sama (r1 = r 2), tapi tiap tiap roda akan berbelok dengan pusat yang berbeda (O1 and O2). Belokan yang halus akan memungkinkan karena adanya slip samping dari roda. Hasilnya, meskipun tekanan udara pada [At same turning radius (α=β)] masing masing roda sama, meskipun factor alignment roda sudah benar, roda akan berjalan dengan tidak semestinya. Untuk alasan ini Roda depan pada sisi bagian dalam harus diarahklan dengan sudut yang lebih tajam dibandingkan roda depan bagian luar. Hal ini disebut dengan efek Ackerman. Pada kenyataannya, Toe Out pada belokan dilakukan oleh sambungan kemudi yang dimodifikasi untuk mendapatkan sudut steering yang tepat dari kiri dan kanan pada [At different turning radius (α 0) menjadi lebih lembut. Begitu juga, saat body mobil bergerak naik (X1 > 0) compression stroke (X1 X0 < 0) dari variabel damper menjadi lebih lembut, sebaliknya rebound stroke (X1 - X0 > 0) menjadi lebih keras. Shock Absorber tipe reverse ( salah satu dari continuous variabel damper) tergabung untuk semi-active suspensi menggunkan sprung weight velocity. Saat X1 > 0, mode H/S (rebound keras ; Kompresi : lembut) diterapkan, saat X1 < 0, mode S/H (rebound : lembut ; Kompresi : keras) diterapkan dengan mengontrol arus yang digunakan pada variabel damper.
[Example- Sky-Hook control by reverse damper] 35
Training Material & Publication
WHEEL ALIGNMENT & ECS Gambar ini menunjukan bahwa sebuah variable damper (reverse damper) dari sistem ECS menghasilkan guncangan yang kecil pada gundukan jalan dibandingkan dengan sistem damping yang konvensional.
SKY HOOK DAMPER – KEUNTUNGAN DARI DAMPER TIPE REVERSE Berdasarkan Teori Karnopp, mode control dari damping force dikelompokan dalam 4 kasus dengan kombinasi dari gerakan body dan kecepatan relative antara body dan roda. Untuk memilih mode yang optimal dalam sistem variable damper normal, diperlukan informasi dari sensor G pada massa sprung dan sensor ketinggian. Damper semi active didesain dengan mempunyai karakteristik damping yang unik untuk membatasi sensor ketinggian. Karakteristik ini dijelaskan pada table, dengan nama• proses rebound dengan posisi keras sementara proses kompresi mempunyai posisi lembut dan• proses rebound mempunyai posisi lembuit, sementara proses kompresi mempunyai posisi keras. Sebagai hasilnya, kita dapat mengontrol sistem hanya dengan informasi dari sensor G. namakan sistem ini dengan “reverse type damping system” atau tipe H/S .
36
Kita
Training Material & Publication
WHEEL ALIGNMENT & ECS
SYSTEM PERFORMANCE Sebelumnya, kita akan menjelaskan tentang garis besar dan performance sistem dari sistem suspensi semi-active generasi baru.
1) Kontrol Body Gerakan pitching dan bouncing dikontrol dengan sensor percepatan vertical.
Gerakan roll,
dive, squat dikontrol denagn sensor kecepatan, sensor sudut kemudi dan sinyal switch rem. 2) Kontrol Gaya Damping Untuk menjalankan control body ini, tipe reverse damping force diadopsi untuk menyesuaikan teori sky-hook.
Ini dapat mengontrol gaya damping terus menerus dari posisi H/S ke posisi
S/H. 3) Actuator Actuator adalah valve solenoid yang rpoporsional menempel pada sisi shock absorber.
Waktu
respon dari posisi H/S ke posisi S/H, atau dari posisi S/H ke posisi H/S adalah kurang dari 30ms. Arus dari solenoid proporsional yang digunakan untuk mengontrol adalah kurang dari 1.3 A.
37
Training Material & Publication
WHEEL ALIGNMENT & ECS
KONSTRUKSI DAN OPERASI SHOCK ABSORBER Semua shock absorber hidrolik bekerja dengan prinsip konversi energi kinetic (gerakan) menjadi energi thermal (panas). Untuk tujuan tersebut, fluida dalam shock absorber didorong mengalir melalui saluran tertutup dan sistem valve, hingga membangkitkan resistansi hidrolik. Sebuiah shock absorber (damper) dapat dikompresi dan didekompresasikan ; dan disebut bump stroke dan rebound stroke. Bump stroke Saat piston rod ditekan, pelumas mengalir tanpa hambatan dari bawah piston melalui orifices dari valve piston. Secara serempak, sejumlah pelumas berpindah karena adanya rod yang memasuki silinder. Sejumlah pelumas ini mengalir melalui valve body kedalam tube reservoir (berisi udara (1 bar atau gas nitrogen (4-8 bar)). Resistansi berhadapan dengan pelumas yang sedang mengalir melalui body valve, membangkitkan bump damping.
Rebound stroke Saat rod piston ditarik keluar, pelumas diatas piston tertekan dan terdorong masuk melalui piston. Resistan, berhadapan d[Construction engan pelumas yang Absorber] sedang of Shock mengalir melalui piston, dan membangkitkan rebound damping. Sejumlah pelumas mengalir balik secara serempak, tanpa ada hambatan, dari reservoir tube melalui valve body ke bagian silinder yang lebih rendah untuk mengganti volume rod piston yang keluar dari silinder.
ECS SHOCK ABSORBER Valve damping force control berada di sisi shock absorber disebelah atas ruangan piston dan dihubungkan dengan dibawah ruangan piston dan melewati bagian tengah jalan pintas. Ukuran orifice didalam variable control valve berubah sesuai dengan arus yang mengalir menghasilkan variabel damping force.
[ECS Shock Absorber: simple model]
Dalam proses rebound, valve pemeriksa dari piston akan menutup dengan sendirinya dan pelumas mengalir dari ruangn bagian atas dari piston ke valve pengontrol melalui lubang yang ada di sisi dalam tube dan bagian tengah ruangan. 38
Training Material & Publication
WHEEL ALIGNMENT & ECS Saat pelumas melewati control valve, dia akan mengalir ke ruang bawah piston melewati ruang bagian tengah dan lubang yang ada di bagian bawah dari bagian dalam tube. Pada saat yang sama, pelumas disuplai dari reservoir ke ruang bagian bawah piston melalui suction valve dari body. Pada proses jouncing, valve satu arah dari body menutup dan pelumas mengalir dari ruang bawah piston ke ruang atas, volume rod volume dari pelumas mengalir ke lubang di bagian bawah dari tube bagian dalam, bagia tengah , valve control dan kembali ke ruangan reservoir.
KARAKTERISTIK DAMPING FORCE Sesuai dengan karakteristik damping force yang digambarkan pada skema, shock absorber mempunyai tipe reverse damping force. Arus input dari solenoid proporsional antara 0.3A dari posisi S/H.
Arus dari posisi S/S adalah
0.8A. Saat actuator salah dengan kondisi arus 0 A, posisi akan berubah ke posisi H/S. Saat arus mulai turun dari 0.8A dari posisi S/S, rebound side damping force meningkatkan karakteristik orifice dan membuat point blow off lebih tinggi. Saat arus meningkat dari 0.8A, jouncing side damping force meningkatkan karakteristik orificedan membuat point blow off lebih tinggi.
[Oil Flow of ECS Shock Absorber]
39
Training Material & Publication
WHEEL ALIGNMENT & ECS
SEMI-ACTIVE CONTROL Sejumlah kontrol kemudi yang mengatur gerakan vertikal mobil, didasarkan pada tiga sensor percepatan dan sebuah sensor kecepatan mobil. Kontrol Anti-Roll yang mengatur gerakan dari arah samping didapatkan dari sensor roda kemudi dan sensor kecepatan mobil. Kontrol Anti-Dive menggunakan sinyal on / off brake (rem) dan kecepatan mobil dan kontrol atisquat didapatkan dari sinyal TPS.
Kontrol Kecepatan sensitive mengubah keseluruhan gaya
damping porposional terhadap keceptan mobil. Dengan informasi yang terdeksi oleh sensor , ECS control modul memberikan arus tertentu ke solenoid dari shock absorber.
BODY CONTROL Gerakan Pitching dan bouncing dikontrol dari hubungannya dengan sinyal dari sensor percepatan vertical.
Gerakan roll, dive, squat dikontrol dari hubungannya dengan sensor
kecepatan, sensor kemudi dan switch rem dan sensor posisi throttle. Konsep dasar dari sistem logika ini seperti perhitungan kecepatan absolute unsprung dengan menyatukan output dari sensor perceptan pada unsprung, kemudian menentukan target gaya damping tergantung pada rate proporsional dari kecepatan absolute, dan mengontrol output actuator. RIDE CONTROL
a) Road judgement control Bertujuan untuk meningkatkan efek dari kontrol dan mencegah penurunan kenyamanan [Specification of ECS Shock berkendaraan. Penilaian kondisi jalan menggunakan sensor percepatan dan ECU mengubah parameter berdasarkan hasil dari alat ini. Hasil penilaian ditentukan oleh sinyal dari sensor percepatan dari FR dan FL. Tidak ada prioritas antara FR dan FL. ( Sensor : AG Sensor (FR,FL)
40
Training Material & Publication
WHEEL ALIGNMENT & ECS
˚ b) Kontrol Feed Back Anti–bounce
Bertujuan mengontrol bounce. Penambahan kecepatan body depan dan belakang, ECU mengontrol gaya damping sesuai dengan hasil dari alat ini.
˚
c) Kontrol feed back Anti–pitch Bertujuan mengontrol pitching. Pengurangan kecepatan body depan dan belakang, ECU mengontrol gaya damping yang proporsional dengan hasil dari alat ini.
c) Kontrol feed back Anti–roll
41
Training Material & Publication
WHEEL ALIGNMENT & ECS Bertujuan mengontrol roll. Pengurangan kecepatan body kiri dan kanan, ECU mengontrol gaya damping yang proporsional dengan hasil dari alat ini.
HANDLING a) Kontrol Anti–roll feed forward Control Bertujuan mengontro roll. Dengan menggunakan sensor steering dan kecepatan, ECU mengontrol gay damping menggunakan output sensor ini. Damping control: Rebound Hard (H/S)
b) Kontrol Anti–dive Ini bertujuan mengontrol dive. Menggunakan sensor switch rem dan kecepatan, ECU mengontrol gaya damping dengan menggunakan output dari sensor ini. Damping control: Front Compession Hard (S/H), Rear Rebound Hard (H/S)
42
Training Material & Publication
WHEEL ALIGNMENT & ECS d) Kontrol Anti–squat Ini bertujuan mengotrol squat. Output dari sensor posisi throttle lebih dari standard, ECU mengontrol gaya damping “front:hard/rebound, rear:soft/rebound”. Dan dia kan berhenti setelah melewati waktu yang konstant.
Damping control: Front Rebound Hard (H/S), Rear Compression Hard (S/H)
e) Stabilitas kecepatan tinggi Ini bertujuan mengontrol stabilitas kecepatan tinggi. Menggunakn sensor kecepatan, ECU mengontrol gaya damping dengan menggunakan output dari sensor tersebut.
43
Training Material & Publication
WHEEL ALIGNMENT & ECS
KONSTRUKSI SEMI-ACTIVE ECS SKEMA SISTEM
44
Training Material & Publication
WHEEL ALIGNMENT & ECS LOKASI KOMPONEN
INPUT & OUTPUT INPUTS
OUTPUTS
45
Training Material & Publication
WHEEL ALIGNMENT & ECS
INPUT 1) TERMINAL ALTERNATOR ‘L’ a. Aplikasi ECS control module mendeteksi pengisian arus menggunakan sebuah generator teminal “L”. Jika Output dari generator pengisian arus adalah normal setelah pengapian dinyalakan, ECS ECM akan mengoperasikan sistem ECS dengan normal. Jika tegangan output generator lebih rendah karena adanya pengurangan pada belt dan kesalahan generator, maka relay actuator akan off dan operasi ECS akan berhenti. b. Spesifikasi - Tegangan output pada mesin berhenti : 5V Max - tegangan output pada mesin berjalan : 10V Min
[Low voltage]
[Normal] 2) SWITCH BRAKE / REM
Sinyal switch brake / rem digunakan sebagai input pada control anti-dive. Sinyal swith rem ini dihubungkan secara parallel dengan lampu stop dan digunakan untuk menentukan kondisi operasi rem oleh pengemudi. a. Aplikasi
+5V
sinyal in-out untuk control anti-dive. Spesifikasi : - karakteristik Steady state : Terbuka normal (Menutup saat rem diletakkan)Tegangan turun : 0.25V MAX (pada 0.12A)
R R BRAKE
- Tidak ada kode DTC
D
46
C
Training Material & Publication
WHEEL ALIGNMENT & ECS 3)SWITCH MODE ECS (SWITCH SPORT/NORMAL) Switch mode ECS digunakan untuk memilih mode sport atau normal tergantung pada kondisi saat berjalan. Spesifikasi - Tipe Switch : Terbuka normal (kembali sendiri) - Switch on (SPORT): 0.25 V atau kurang - Switch off (NORMAL): 4.5 V atau lebih
4) SENSOR KECEPATAN MOBIL ECSCM akan menggunakan sinyal sensor kecepatan mobil. Sinyal kecepatan digunakan untuk mengontrol handling, anti-dive, anti-roll stabilitas saat berjalan dengan kecepatan tinggi. Sensor kecepatan dibuat dari elemen hall, yang ada di transaxle. Rotor dengan 4 proyeksi diletakan di dalam sensor, akan berotasi untuk membangkitkan efek hall dan menghasilkan output pulsa digital. a. Spesifikasi - Revolusi : 637 rpm pada kecepatan 60km/h- Pulse/1 revolusi : 4 Pulsa/ 1 revolusi - Voltage turun : 1.5V Max pada 1.5mA - Tegangan output : 0V, 5V- Chattering : 1 ms Max- Rasio Duty : 50±20% b. Kegunaan Sinyal input untuk control anti-dive , control anti-roll, control kecepatan tinggi.
[Sensor circuit and sensor output 47
Training Material & Publication
WHEEL ALIGNMENT & ECS 5) SENSOR STEERING / KEMUDI Sinyal sensor steering akan digunakan sebagai sinyal inputuntuk mengontrol anti-roll. Sensor steering / kemudi menggunakan LED dan photo-transistor dan sensor A (ST1) dan sensor B (ST2) digunakan untuk mengarahkan roda. Sebuah slit-plate diberikan diantara photo-transistor dan LED. Slit-plate ini mempunyai 45 lubang, dia akan berputar saat kemudi roda berputar. Photo-transistor akan beroperasi tergantung pada sinar yang melewati lubang slit-plate dan sinyal pulsa digital dihasilkan. ECM akan menggunakan sinyal untuk membangun sudut dan kecepatan roda. a. Aplikasi - Sinyal input untuk kontrol anti-roll - Lokasi : bagian dalam kemudi roda - Menghitung besar dan arah kemudi - 3 Sinyal input
(ST 1, ST 2, ST N)
- ST N mendeteksi posisi netral dari kemudi roda b. Spesifikasi - Tipe sensor : Tipe Photo interrupt - Tipe sensor output : Tipe Open Collector - Jumlah pulsa output : 45pulse (lingkaran pulsa 8°)- rasio duty : 50±10%Perbedaan fase output : 2.0 ±0.6°- Supply Tegangan :IGN1(8~16V)Output :1.3•VOL •2.0V, 3.3•VOH •4.0V-Kecepatan rotasi maximum : 1,500°/s
Tegangan
c. Operasi Terdapat hall plate antara LED photo-controller dan photo-transistor. Hall plate berputar bersamaan dengan rotasi roda kemudi, sinyal elektrik akan dibangkitkan tergantung apakah sinar LED melewati plate dan sampai ke photo-transistor atau tidak. Sinyal tersebut adalah kecepatan sudut dari roda kemudi dan digunakan untuk mendeteksi arah belokan roda kemudi. -
Photo-transistor on: sensor output 0.5V atau kurang
-
Photo-transistor off: sensor output mendekati 3.5V
48
Training Material & Publication
WHEEL ALIGNMENT & ECS d. Output sensor kemudi
e. Data arus saat sensor terbuka
[Tegangan output saat belok ke kanan]
[Tegangan Output saat belok ke kiri]
49
Training Material & Publication
WHEEL ALIGNMENT & ECS 6) THROTTLE POSITION SENSOR Sinyal sensor posisi Throttle adalah inout untuk control anti-squat. Saat mobil dihidupkan, pengemudi akan menginjakan pedal gas, sinyal dari sensor posisi throttle akan menghasilkan perubahan kecepatan dan besarnya perubahan akan mendeteksi percepatan yang berubah. Sinyal digunakan untuk menentukan squat damping force variable solenoid valve piston. TPS adalah sebuah sensor analog menggunakan resistor variable. Engine ECM akan menkonversikan sinyal input analog dari TPS ke sinyal pulsa digital (PWM) untuk digunakan oleh sistem yang lain. Kemudian ECSCM akan menerima sinyal input digital (PWM). a. Spesifikasi - Tipe sinyal output : PWM output- Duty sinyal output : 11%(sudut 0°) ~ 91%(sudut 90°)- Frekuensi PWM : 100Hz b. Kegunaan : Kontrol Anti-squat c.
50
Training Material & Publication
WHEEL ALIGNMENT & ECS Sensor sirkuit dan karakteristik output
d. Sinya output
7) SENSOR PERCEPATAN (G-SENSOR) Untuk mendeteksi sebuah plane / pesawat, paling
Sensor
tidak diperlukan 3 titik. Ada 3 G sensor : depan kanan, depan kiri, dan belakang. ECSCM akan mendeteksi tegangan output G sensor dan menentukan gerakan mobil kearah vertical. ECSCM akan menggunakan sinyal input G sensor sebagi sinyal utama untuk mengontrol anti-bounce, anti-pitch, dan anti-roll. a. Aplikasi : sinyal utama untuk kenyamanan berkendara
connector
[Acceleration Sensor] (3EA)
b. Spesifikasi - Tegangan Input: 5V±0.25V- Tegangan output: 0.55 ~ 4.45V- Sensitifitas: 2.0V/g- Range: +1g 51
Training Material & Publication
WHEEL ALIGNMENT & ECS ~ 1g- Temperatur pengoperasian : 40 ~ +125 • c. Sensor lokasi (FR sensor, FL sensor, Rear sensor)
d. Sensor konstruksi IC
e.
Karakteristik sensor sirkuit dan sensor output
52
Training Material & Publication
WHEEL ALIGNMENT & ECS f.
Data arus & sensor output
[At plane surface]
[At around 45º]
53
Training Material & Publication
WHEEL ALIGNMENT & ECS
[At around 90º]
[When the sensor is open]
54
Training Material & Publication
WHEEL ALIGNMENT & ECS
OUTPUT 1) ACTUATOR RELAY Sistem operasi relay ECS actuator akan dikontrol oleh ECSCM. Saat pengoperasian ECS actuator relay, arus akan disediakan oleh damping force variable solenoid valve melalui rangkaian internal ECSCM. Saat tegangan generator terminal “L” turun ke “LOW” ketika mobil berjalan, ECSCM akan menghentikan operasi actuator relay.
a. Aplikasi Actuator relay diaktikan oleh ECS control module dan menyuplai power ke proporsional solenoid. b. Spesifikasi - Konsumsi Power: 1.8W (at 12 V)- Temperatur pengoperasian : 40 ~ +100• - Arus control : 150 mA c. Fungsi - ECU control ground - Saat ECS control: 0V - Diluar ECS control: 12V [Actuator relay circuit]
d. Data arus saat relay off
55
Training Material & Publication
WHEEL ALIGNMENT & ECS 2) LAMPU ECS Lampu indikator ECS diletakan pada panel instrument akan “on” dengan dipilihnya mode sport atau akan berkedip jika sistem ECS salah / gagal. ECSCM mengontrol terminal ground saat sinyal switch diinputkan atau saat kesalahan / kegagalan sistem terdeteksi. a. Spesifikasi - Tipe: LED- Kebutuhan Power : Max 25mA (pada 12 V) b. Aplikasi lampu ECS lamp bekerja saat mode sport dipilih atau saat ada kesalahan / kegagalan pada sistem. c. Operasi lampu - Normal: OFF,
Sport: ON,
Gagal : berkedip
d. Spesifikasi ECS Control Mode & Lampu Control Saat berjalan normal, lampu akan dinyalakan dan dimatikan oleh switch. Tapi lampu akan menyala selama 3 menit setelah control module diaktifkan. a) Pilih Sport: Lampu ECS ON b) Pilih normal: lampu ECS OFF
- Pendeteksian masalah : Jika beberapa masalah terdeteksi, angka diagnosa yang mewakili masalah dicatat. Pada saat yang bersamaan lampu “sport” akan on dan off. Jika maslah sudah terdeteksi, lampu mulai on dan off.
- Lampu sport menyala saat komunikasi HI-SCAN
56
Training Material & Publication
WHEEL ALIGNMENT & ECS e. Sinyal output dari lampu ECS
3) SOLENOID VALVE (TIPE PROPORTIONAL) Arus yang diberikan ke damping force variable solenoid valve akan dikontrol oleh ECSCM. Tergantung pada arus yang diberikan, spool valve dalam actuator akan bergerak dan mengubah jalur aliran dan mengatur variasi damping force. a. Aplikasi : Sinyal utama untuk kenyamanan berkendara. b. Spesifikasi - Range arus output : 0.3A ~ 1.3A keras / kompresi lembut : 0.3A
1) Rebound
2) Rebound lembut / kompresi lembut : 0.8A 3) Rebound lembut / kompresi keras : 1.3ATegangan dasar : 12V - Tegangan operasi : 10 ~ 16 V- frekuensi PWM : 500Hz c. Lokasi
57
Training Material & Publication
WHEEL ALIGNMENT & ECS
d. Konstruksi
Dalam proses rebound, prosedur untuk mengubah damping force hard adalah sebagai berikut: - Kurangi arus pada solenoid actuator kemudian pindahkan pilot spool / kumparan ke sisi kanan, dan menekan area dari control port, sehingga gaya damping dari orifice control meningkat dan tekanan ruangan dibelakang valve utama akan bertambah.
Sebagai
hasilnya, damping force berubah ke hard / keras, karena meningkatnya tekanan pembukaan dari valve utama. Prosedur untuk mengubah damping force soft / lembut adalah sebagai berikut ; - Tingkatkan arus dari solenoid actuator kemudian pindahkan pilot spool / kumparan ke sisi kiri dan membuka control port, pelumas akan mengalir melalui kedua orifice dari samping rebound valve utama dan control port dari pilot spool, sehingga damping force dari orifice control berkurang, dan pada saat yang bersamaan tekanan ruangan dibelakang valve utama karena turunnya tekanan dari orifice valve utama, kemudian point blow off pada valve utama bergerak ke sisi bagian bawah, sebagai hasilnya damping force berubah menjadi lembut / soft. Dalam kasus proses jouncing, jika anda ingin membuatnya hard / keras, arus harus dikurangi. e. Operation (mode HARD/SOFT) Saat arus yang digunakan turun menjadi 0.8A, spool valve berpindah ke kiri sehubungan dengan gaya dari pegas yang mendorong spool valve melebihi gaya magnetic dari solenoid coil.
58
Training Material & Publication
WHEEL ALIGNMENT & ECS Selama tahap kompresi, pelumas mengalir dari ruang kompresi ke dasar ruangan dengan bebas sebab spool valve telah terbuka. Sebagai hasilnya, tahap / langkah kompresi menjadi lembut / soft. Saat spool valve bergeser ke kiri, pembukaan untuk ruangan rebound ke ruang dasar menerima aliran pelumas yang sedikit dan terbatas. Saat arus mencapai 0.3A, jalur pelumas tertutup sepenuhnya dan langkah rebound menjadi paling keras / hard. f. Operasi (mode SOFT/HARD) Jika arus yang diaplikasikan naik diatas 0.8A, spool valve bergeser ke samping kanan mengurangi aliran pelumas yang meuju ke ruang kompresi. Saat arus meningkat sampai 1.3A, pembukaan antara ruang kompresi dan ruang dasar tertutup sepenuhnya. Pada 1.3A langkah kompresi menjadi paling keras / hard. Selama langkah rebound, jalur pelumas dari ruangan rebound ke ruangan dasar melalui spool valve terbuka, sehingga langkah rebound sedikit lembut / soft. g. Operasi (mode SOFT/SOFT) Saat arus yang digunakan adalah 0.8A, damping force adalah lembut/soft untuk kedua langkah kompresi dan rebound. Pada 0.8A, jalur spool valve keduanya terbuka. Pelumas didalam ruangan rebound dan kompresi menglir dengan mudah ke truangan dasarmelalui spool valve. h. Current data & output signal Base
[Oil flow at the Hard/Soft mode, 0.3A ~ 0.8A]
59
Training Material & Publication
WHEEL ALIGNMENT & ECS Base Compression
Rebound
[Oil flow at the Soft/Soft mode, 0.8A]
Base Compression
Rebound
[Oil flow at the Soft/Hard mode, 0.8A ~ 1.3A]
60
Training Material & Publication
WHEEL ALIGNMENT & ECS
*Kontrol saat SOFT/SOFT
* Kontrol saat SOFT/HARD
* Kontrol saat HARD/SOFT
61
Training Material & Publication
WHEEL ALIGNMENT & ECS
DTC LIST
62
Training Material & Publication
WHEEL ALIGNMENT & ECS
No.
Failure
Cancellation Condition
1
ACG L-Terminal
ACG L-Terminal output changes LOW to HIGH.
2
Steering sensor
Sensor output voltage outputs normal value.
3
Speed sensor
Sensor output more than 3 km/h.
Acceleration sensor (Including connector disconnection)
Acceleration sensor output is within the range from 2.5-0.2V to 2.5+0.2V.
4 5 6 7 8 9 10 11 12
Sensor power source voltage Damping force change actuator FR Damping force change actuator FL Damping force change actuator RR Damping force change Actuator RL Actuator relay
ACG L-Terminal output changes LOW to HIGH.
ACG L-Terminal output changes LOW to HIGH.
ACG L-Terminal output changes LOW to HIGH.
DIAGNOSTIC TROUBLE CODE / KODE DIAGNOSA MASALAH BATTERAY : C1101 a. Deskripsi diagnosa masalah - Tegangan rendah (Engine berjalan): Tegangan operasi actuator adalah lebih besar dari 17V selama lebih dari 20 detik. - Tegangan tinggi (Engine berjalan): Tegangan operasi actuator adalah lebih dari 18V selama lebih dari 2 detik. b. Aksi yang diambil oleh ECU : Relay OFF c. Kondisi pembatalan: Terminal output ACG-L mengubah rendah ke tinggi (9~16V) selama lebih dari 100milidetik. TERMINAL ALTERNATOR L : C1107, C11081) DTC: C1108 (tegangan rendah, Engine berjalan) a. Deskripsi diagnosa masalah: Tegangan output kurang dari 8.5V selama lebih dari 10 detik. Saat keceptan mobil lebih dari 40km/h. b. Aksi yang diambil oleh ECU : relay off. Kondisi pembatalan : tegangan output adalah lebih dari 9.5V selama lebih dari 100 milidetik 63
Training Material & Publication
WHEEL ALIGNMENT & ECS
2) DTC: C1107 (Tegangan tinggi, Engine berjalan) a. Deskripsi diagnosa masalah : Tegangan output lebih dari 16.5V selama lebih dari 100 detik. b. Aksi yang diambil oleh ECU : relay off c. Kondisi pembatalan : tegangan output kurang dari 16V selama lebih dari 100 milidetik ACTUATOR RELAY : C2124 a. Deskripsi diagnosa masalah - Tegangan rendah saat on (Engine berjalan):Tegangan operasi actuator kurang dari 8.0V selama lebih dari 10 detik - Tegangan tinggi saat off (Engine mati): Tegangan operasi actuator lebih dari 9.5V selam lebih dari 2 detik. Saat kunci kondisi ON. b. Aksi yang diambil oleh ECU : relay OFF c. Kondisi pembatalan - Tegangan rendah saat ON (mesin berjalan) : terminal output ACG-L mengubah dari rendah ke tinggi (9~16V) selama lebih dari 100 milidetik. - Tegangan tinggi saat off (Engine mati) : Terminal output ACG-L mengubah dari rendah ke tingi (9~16V) dan 0V selama lebih dari 100 milidetik.
SENSOR KECEPATAN : C1212 (OPEN/SHORT, ENGINE BERJALAN) a. Deskripsi diagnosa masalah: TPS output duty adalah lebih dari 40%, dan output kurangd ari 3 km/h selama lebih dari 1 menit. b. Aksi yang diambil ECU : Hard/Soft (F: 0.55A, R: 0.63 A) c. Kondisi pembatalan: Kecepatan mobil lebih dari 3km/h selama lebih dari 10 milidetik. SENSOR KEMUDI : C1259 (OPEN/SHORT, ENGINE BERJALAN) a. Deskripsi diagnosa masalah: Tegangan output sensor kurang dari 0.8V dan lebih dari 4.6V selama lebih dari 30 detik. b. Aksi yang diambil oleh ECU : menghentikan control Roll c. Kondisi pembatalan : Tegangan output kanan lebih dari 10 milidetik.
SENSOR PERCEPATAN (FR:C1279
FL:C1278
RR:C1281)
1) Open/Short (Engine berjalan) a. Deskripsi diagnosa masalah : Tegangan outpt sensor kurang dari 0.5V atau lebih dari 4.5V selama 2 menit. b. Aksi yang diambil oleh ECU: menghentikan control kemudi / ride. 64
Training Material & Publication
WHEEL ALIGNMENT & ECS c. Kondisi pembatalan : output sensor percepatan adalah 2.5±0.2V selama lebih dari 10 milidetik. 2) Sinyal Error (Engine berjalan) a. Deskripsi dianosa masalah : Output sensor tetap pada level yang sama tidak kurang dari 1.9V atau lebih dari 3.1V selama 2 menit. b. Aksi yang diambil ECU : menghentikan control kemudi / ride. c. Kondisi pembatalan : output sensor percepatan sebesar 2.5±0.2V selama lebih dari 10 milidetik. SOLENOID VALVE (FR:C2216 FL:C2212 RR:C2224
RL:C2220)
a. Deskripsi diagnosa masalah : Kabel yang dikekang terbuka lebih dari 30 detik. b. Aksi yang diambil oleh ECU : Relay OFF c. Kondisi pembatalan : Output terminal ACG-L mengubah dari rendah ke tinggi (9~16V) selama lebih dari 100 milidetik.
65
Training Material & Publication
WHEEL ALIGNMENT & ECS
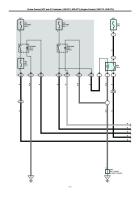
DIAGRAM PENGKABELAN
* Refer to the shopmanual for pin assignment
66
Training Material & Publication
WHEEL ALIGNMENT & ECS DIAGRAM PENGKABELAN SEDERHANA (mengacu pada manual pembagian tugas pin)
67
Training Material & Publication